








主な特長と利点
お客様の信頼は基盤の上に築かれると確信しています。
-

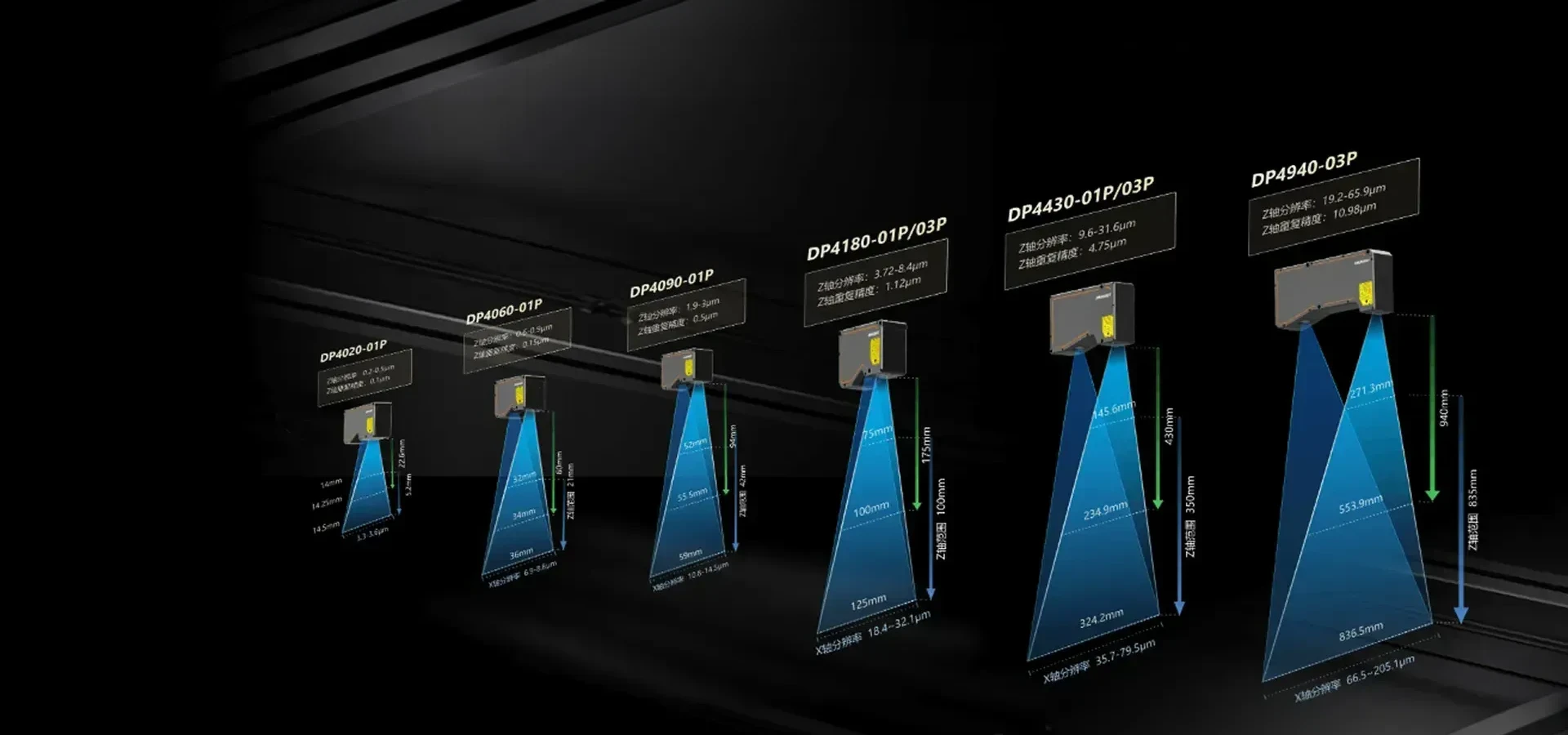
 高精度・高解像度
高精度・高解像度 -
 性能と価格のバランス
性能と価格のバランス -
 広範囲・広視野角
広範囲・広視野角
製品一覧



左にスワイプ
| PMD02-E1 | PMD03-E1 | PS802-E1 | PS800-E1 | PM806-E1 | |
|---|---|---|---|---|---|
| 技術の原理 | アクティブ・ステレオ | アクティブ・ステレオ | アクティブ・ステレオ | アクティブ・ステレオ | アクティブ・ステレオ |
| レーザー波長帯 | 940nm | 940nm | 940nm | 940nm | 850nm |
| 光源 | 赤外線レーザー×2(波長 = 940 nm) 赤外線フラッドライト×4 | 赤外線レーザー×2(波長 = 940 nm) 赤外線フラッドライト×4 | 赤外線レーザー 1個 赤外線フラッドライト 1個 | 赤外線レーザー 1個 赤外線フラッドライト 1個 | 赤外線レーザー×2 |
| シャッターの種類 | Global | Global | ROlling | ROlling | Global |
| 図面出力までの所要時間 | <900ms | <900ms | 1695ms | デフォルトモード:約1781ms クオリティモード:約958ms ファストモード:約568ms | 1672ms |
| 深度分解能 | 1.54 fps @ 2048 x 1536 1.54 fps @ 1024 x 768 1.54 fps @ 512 x 384 | 1.54 fps @ 2048 x 1536 1.54 fps @ 1024 x 768 1.54 fps @ 512 x 384 | 0.8 fps @ 1280 x 960 0.8 fps @ 640 x 480 0.8 fps @ 320 x 240 | 0.8 fps @ 1280 x 960 0.8 fps @ 640 x 480 0.8 fps @ 320 x 240 | 0.87 fps @ 1280 x 960 0.87 fps @ 640 x 480 0.87 fps @ 320 x 240 |
| フレームレート@解像度(カラー) | 3fps@2560 x 1920@YUYV 4fps@2560 x 1920@CSI BAYER12GBRG 7fps@1920 x 1440@YUYV 14fps@1280 x 960@YUYV 15fps@640 x 480@YUYV | 3fps@2560 x 1920@YUYV 4fps@2560 x 1920@CSI BAYER12GBRG 7fps@1920 x 1440@YUYV 14fps@1280 x 960@YUYV 15fps@640 x 480@YUYV | 4fps@2560 x 1920@YUYV 6fps@2560 x 1920@CSI BAYER12GBRG 8fps@1920 x 1440@YUYV 16fps@1280 x 960@YUYV 25fps@640 x 480@YUYV | 4fps@2560 x 1920@YUYV 6fps@2560 x 1920@CSI BAYER12GBRG 8fps@1920 x 1440@YUYV 16fps@1280 x 960@YUYV 25fps@640 x 480@YUYV | 4fps@2560 x 1920@YUYV 6fps@2560 x 1920 CSI BAYER12GBRG 8fps@ 1920 x 1440@YUYV 16fps@1280 x 960@YUYV 25fps@640 x 480YUYV |
| RGB解像度 | 対応 | 対応 | 対応 | 対応 | 対応 |
| 出力画像 | 深度マップ、カラー画像、赤外線画像、点群データ | 深度マップ、カラー画像、赤外線画像、点群データ | 深度マップ、カラー画像、赤外線画像、点群データ | 深度マップ、カラー画像、赤外線画像、点群データ | 深度マップ、カラー画像、赤外線画像、点群データ |
| Z軸精度 | 0.09 mm@600 mm 0.24 mm@1100 mm | 0.79mm@1500mm 2.70mm@2500mm | 2.52mm@1500mm 4.33mm@2500mm | 0.51mm@500 mm 2.01mm@1000mm | 2.48mm@2000mm 4.25mm@3000mm |
| XY方向の精度 | 1.4 mm@600 mm 2.5 mm@1100 mm | 3.35mm@1500mm 5.63mm@2500mm | 3.43mm@1500mm 5.72mm@2500mm | 4.57mm@2000mm 6.86mm@3000mm | 4.57mm@2000mm 6.86mm@3000mm |
| 視野角 FOV (水平/垂直) | 52°/41° | 51°/41° | 61°/48° | 61°/48° | 62°/49° |
| ベースライン | 160mm | 350mm | 100mm | 62mm | 450mm |
| 推奨測定距離 | 500mm-1100mm | 1000mm~3000mm | 700mm~2500mm | 400mm~800mm | 1250mm~4300mm |
| 最大測定距離 | 400mm-1500mm | 1000mm~4000mm | 400mm ~ 4000mm | 300mm~1000mm | 800mm~4500mm |
| 近距離場 | 425 mm x 378 mm @ 500 mm | 815 mm x 757 mm @ 1000 mm | 780mm x 625mm@700mm | 327mm x 268mm@300mm | 1520mm x 1150mm@125 mm |
| 遠方視野 | 1073 mm x 831 mm @ 1100 mm | 2876 mm x 2271 mm @ 3000 mm | 2945mm x 2225mm@2500mm | 1190mm x 895mm@1000mm | 4190mm x 3900mm@4300mm |
| ホストOS | Linux/Windows/ROS | Linux/Windows/ROS | Linux/Windows/ROS | Linux/Windows/ROS | Linux/Windows/ROS |
| ソフトウェア開発キット | Camport SDK 4 (C/C++) | Camport SDK 4 (C/C++) | Percipio Camport SDK; C、C++、C#、Python などをサポート | Percipio Camport SDK; C、C++、C#、Python などをサポート | Percipio Camport SDK; C、C++、C#、Python などをサポート |
| サイズ | 290mm x 84mm x 65mm | 480 mm x 84 mm x 65 mm | 154 mm x 55 mm x 60 mm | 140.6 mm x 47.0 mm x 60.0 mm | 538.4mm x 85.5mm x 89.6mm |
| 重量 | 1251g | 1368g | 680g | 544g | 2150g |
| データインターフェース | ギガビット・イーサネット | ギガビットイーサネット | ギガビットイーサネット | ギガビットイーサネット | ギガビットイーサネット |
| ネットワークインターフェース | M12 X-Code 8ピン航空用コネクタ | M12 X-Code 8 | M12 X-Code 8 | M12 X-Code 8 | M12 X-Code 8 |
| トリガーおよび電源コネクタ | M12 X-Code 8ピン航空用コネクタ | M12 A-Code 8ピン航空コネクタ | M12 A-Code 8ピン航空コネクタ | M12 A-Code 8ピン航空コネクタ | M12 A-Code 8ピン航空コネクタ |
| 消費電力 | <21W | <21.5W | < 13.5 W | ≤ 10.5W | <16W |
| 筐体材料 | カーボンファイバー+アルミニウム合金 | カーボンファイバー+アルミニウム合金 | アルミニウム合金 | アルミニウム合金 | カーボンファイバー+アルミニウム合金 |
| 保護等級 | IP65 | IP65 | IP65 | IP65 | IP54 |
| 放熱方式 | 自然対流冷却 | 自然対流冷却 | 自然対流冷却 | 自然対流冷却 | 自然対流冷却 |
| 取り付け方法 | 機械的固定(M5ネジ) | 機械的固定(M5ネジ) | 機械固定(M4ネジ) | 機械固定(M4ネジ) | 機械的固定(M5ネジ) |
| 供給電圧 | DC 24V ±10%; PoE (IEEE802.3 at) | DC 24V ±10%; PoE (IEEE802.3 at) | DC 24V ±10%; PoE (IEEE802.3 at) | DC 24V ±10%; PoE (IEEE802.3 at) | DC 24V ±10%; PoE (IEEE802.3 at) |
| 動作温度 | 0 ℃ ~ 45 ℃ | <21.5W | 0 ℃~45 ℃ | 0 ℃~45 ℃ | 0 ℃~45 ℃ |
| 保管温度 | -10 ℃~ 55 ℃ | -10 ℃~ 55 ℃ | -10 ℃~ 55 ℃ | -10 ℃~ 55 ℃ | -10 ℃ ~ 55℃ |
|
比較
|
比較
|
比較
|
比較
|
比較
|
[1] 画像取得のレイテンシ:カメラがソフトウェアトリガーモードで動作する際、ホストコンピュータがソフトウェアトリガー信号を送信してから、カメラから深度画像を受信するまでの遅延時間です。これは、カメラのユーザーセットをデフォルト(標準)に設定し、深度画像の解像度のみを変更して測定されます。