














複合ロボット
概要
協働ロボットの運用シーンにおいて、3Dカメラは移動型協働ロボットに信頼性の高い3次元認識能力を提供します。整然と配置されたワークや資材に対し、カメラは対象の位置や姿勢を迅速に認識し、高精度かつ高サイクルな把持・配置・組立作業を実現します。
動的に変化するフレキシブル生産ライン環境においては、カメラが点群データを通じてワーク、設備、および周辺の障害物の空間形状を正確に再現することで、複合ロボットが作業位置を判断し、衝突を回避し、最適な動作経路を計画できるようにします。
アプリケーション 課題
-

 ワークや治具の材質は多岐にわたり、反射や油汚れが視覚認識の妨げになりやすい
ワークや治具の材質は多岐にわたり、反射や油汚れが視覚認識の妨げになりやすい -
 生産ラインの作業スペースは狭く、物体が互いに重なり合い、姿勢も多様である
生産ラインの作業スペースは狭く、物体が互いに重なり合い、姿勢も多様である -
 工場内の照明や粉塵の状況は複雑であり、動的な環境下では検知の安定性を確保することが困難である
工場内の照明や粉塵の状況は複雑であり、動的な環境下では検知の安定性を確保することが困難である
特長 説明
-


生産ラインの3D点群データを完全に取得し、ワークと作業ステーションの正確な位置決めを実現する
-

ワークの姿勢と位置をインテリジェントに認識し、柔軟な作業経路の計画をサポートします
-

作業場の粉塵や光の干渉に強く、多様なシーンでの安定した連携ニーズに対応
おすすめのカメラ
-
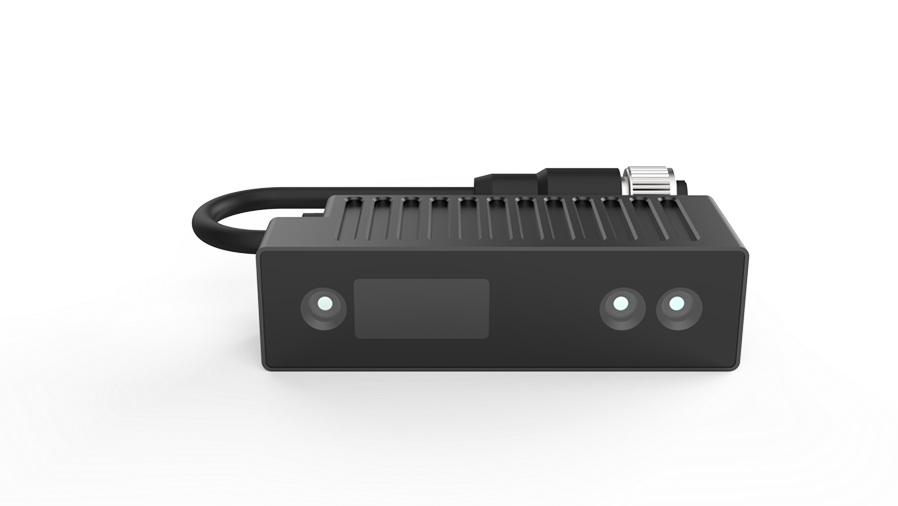
 USD01
USD01小型のストライプ構造光3Dカメラ。近距離での認識・位置決め精度が高く、コンパクトな筐体と高精度な点群画像撮影を実現。HDRに対応しており、材料の搬入・搬出や位置決め・組立など、高精度なガイダンスが求められるシーンに適しています。
詳細はこちら -
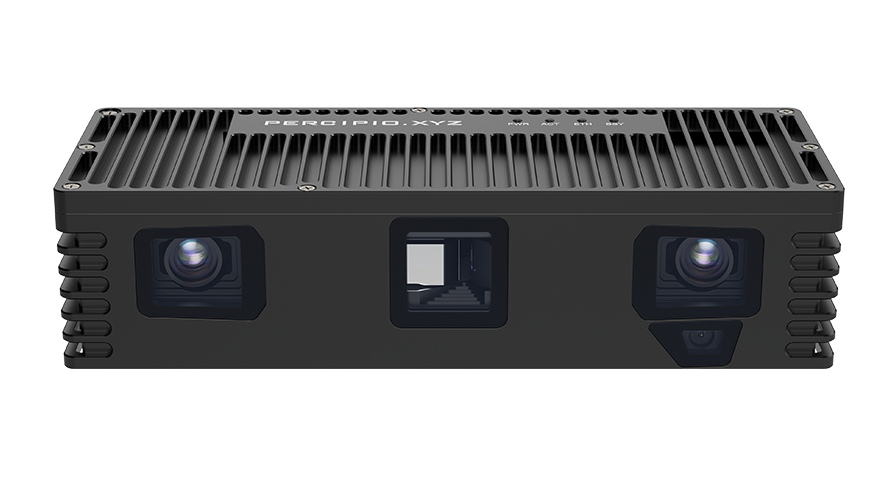
 PS800
PS800独自の知的財産権を有する能動型ステレオビジョン技術を採用し、組み込み型コンピュータビジョンプロセッサを内蔵することで、3Dデータを高精度に取得し、小型の静止物体の高精度測定を実現します。識別、分類、位置特定などの用途に対応しています。
詳細はこちら -
 GM465-E1
GM465-E1コストパフォーマンスに優れた3D産業用カメラ。100Mbpsイーサネットインターフェースを搭載し、産業用レベルの精度と手頃な価格を両立。高速モードと高精度モードのデュアルモードに対応し、幅広い分野の汎用的なシーンに適しています。
詳細はこちら
ケーススタディビデオ
-

各種本格的なオフィス
消耗品
-
各種本格的なオフィス
消耗品
-
各種本格的なオフィス
消耗品
-
各種本格的なオフィス
消耗品

